有哪些开源机械臂项目?
链接:https://www.zhihu.com/question/38961141/answer/1948724524897006171
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
补充类似的开源项目:
得益于关节驱动模组的集成,现在自己攒一个6轴机械臂还是比较简单的事情,高性能的用伺服模组,要求不高的用舵机。只要懂点机械设计与电子方面的知识,很容易攒出来。如果想做控制,就需要了解一点机器人学的知识。去GitHub搜一下,有很多开源的机械臂项目,但是质量也良莠不齐。以下是根据我之前所了解过的,同时简单搜了一下,整理的几个个人认为技术含量比较高,软硬件资料也比较可靠的开源机械臂项目:
1、OpenArm
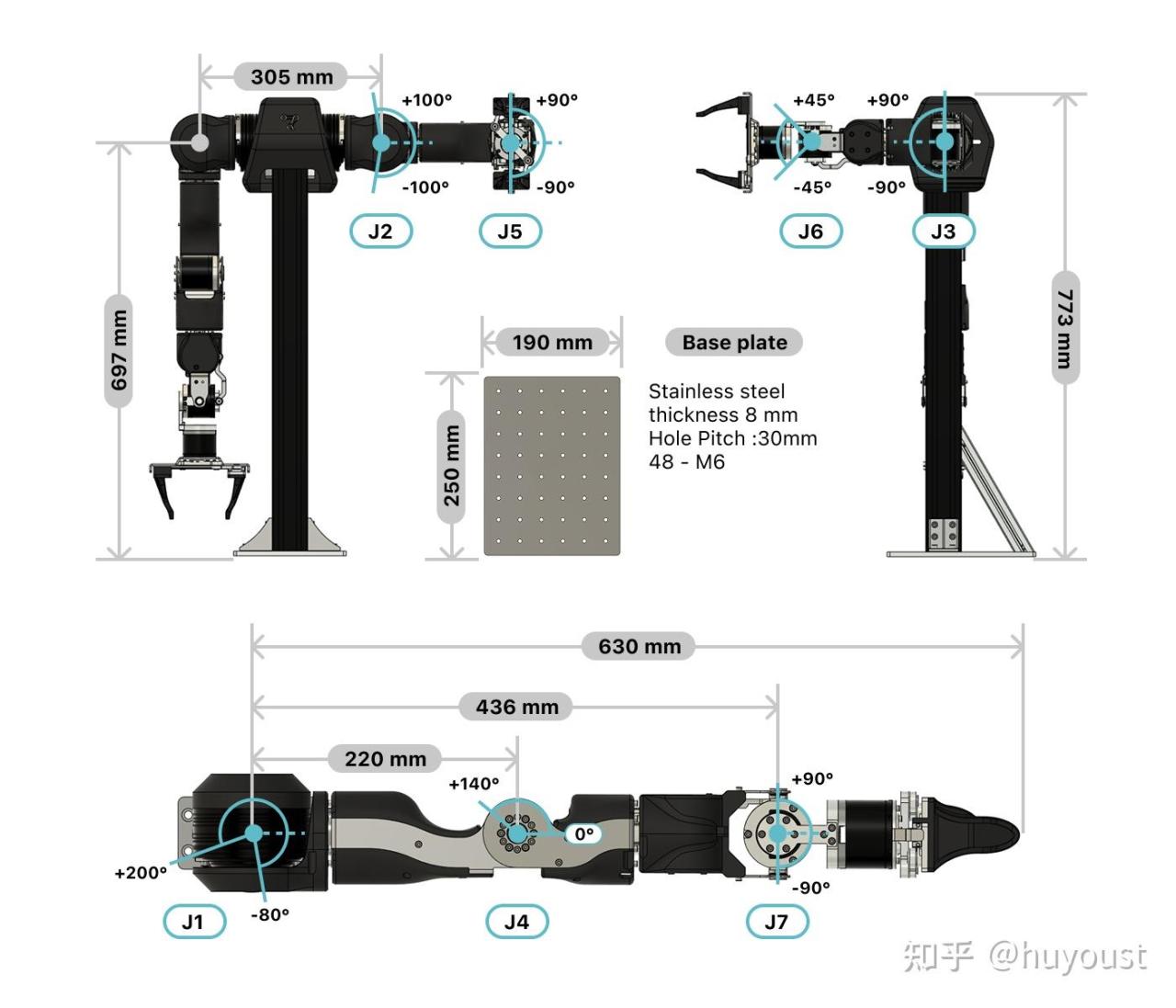
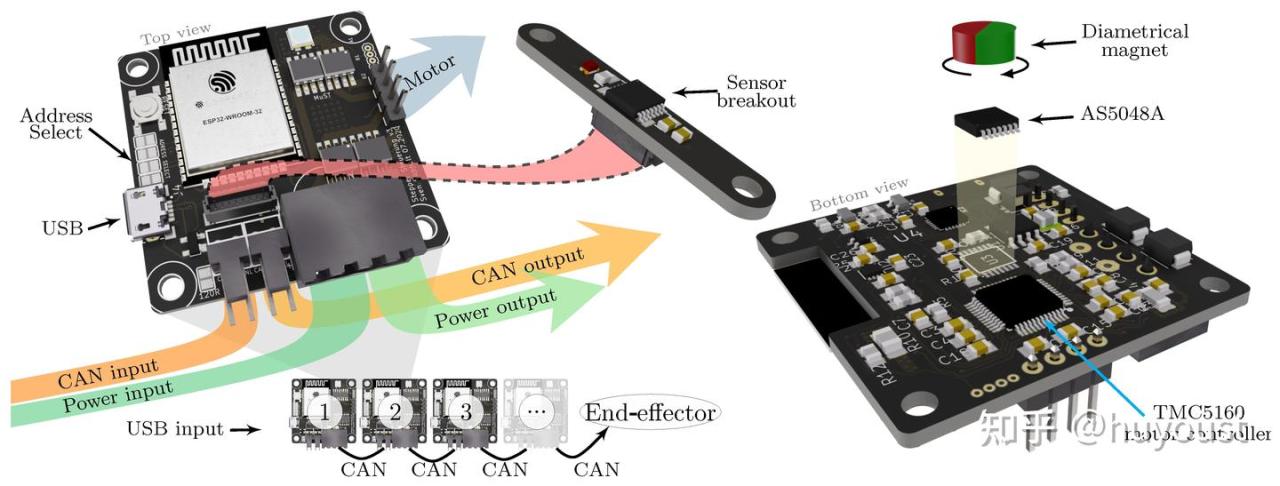
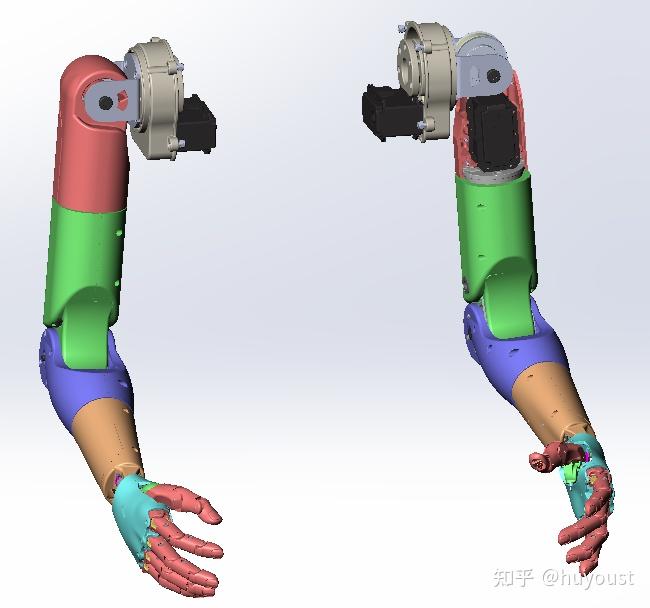
OpenArm是日本的一个开源项目,一款开源7DOF人形手臂,专为在接触丰富的环境中进行物理AI研究和部署而设计,所有硬件和软件都是完全开源的。
主要仓库:
openarm:包含想法、问题和功能请求的主要项目存储库
openarm_hardware:完整的CAD数据:STL文件、STEP文件、Fusion 360组件
openarm_description:URDF/xacro用于仿真的机器人描述文件
openarm_can:用于电机通信的CAN控制库
openarm_ros2:ROS2集成包和节点
openarm_teleop:具有单边和双边控制的遥操作包
openarm_isaac_lab:Isaac Lab模拟环境和培训任务

OpenArm具有类人小巧的体格,支撑柱采用铝制框架,便于调整尺寸和连接摄像头、传感器和其他附件,底板具有均匀间隔的M6螺纹孔,允许将其直接固定在桌子或其他表面上,每个关节都有机械限制,限制了安全的运动范围。
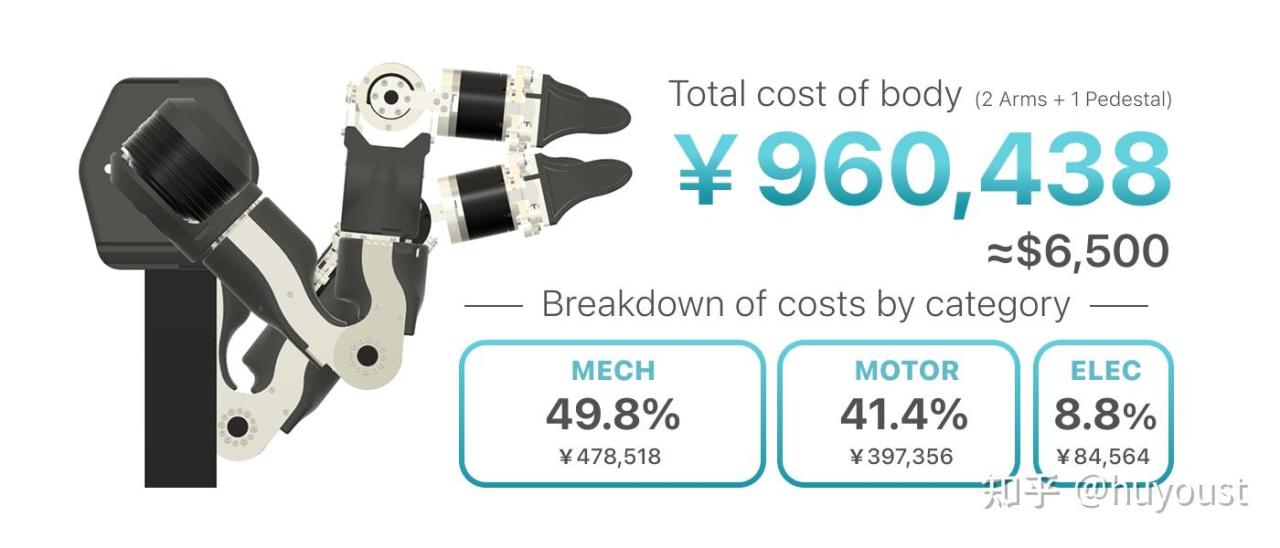
总成本,96万日元,不便宜。
2、Dummy-Robot
这个应该很多人都知道,稚晖君的开源机械臂项目,结构,电子,软件,嵌入式等全部开源,而且代码规范,质量比较高。
B站和Youtube上都有稚晖君自己介绍的视频。

3、Thor
GitHub:https://github.com/AngelLM/Thor
Thor是一款开源、3D打印、6自由度机械臂。Thor设计价格合理且易于使用,是教育环境、制造商和机器人爱好者的理想选择。它的高度为625毫米,可举起高达750克的重量。它的yaw-roll-roll-yaw-roll-yaw配置在工业机械手中很常见。
4、Arctos
- 自由度数:6
- 最大范围:600毫米
- 有效载荷能力:1公斤
- 电子:Arduino/CAN总线
- 软件兼容性:Arctos Studio、ROS、RoboDK
- 应用:适用于教育、拾取和放置任务和自动化目的

5、AR4

6、HELENE
论文:https://www.mdpi.com/2813-6640/3/3/7
源文件:Access Denied
7、SO-ARM100
GitHub:https://github.com/TheRobotStudio/SO-ARM100

8、PAROL6-Desktop-robot-arm
GitHub:https://github.com/PCrnjak/PAROL6-Desktop-robot-arm

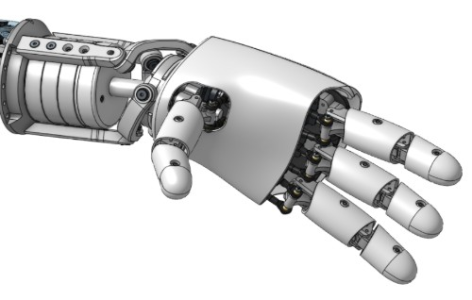
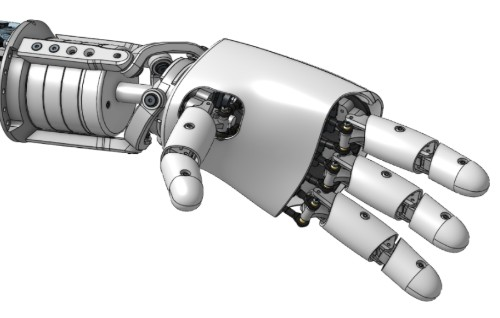
9、Anthropomorphic Robot Hand and Arm
这个我觉得是设计的最好看的一个仿人手臂了,比现在很多人形机器人的手臂好看多了,而且很多年前就开源了,可惜只开源了结构设计。
10、Faze4 Robotic arm
6轴机械臂,使用6个步进电机驱动,3D打印的摆线针齿轮减速器。隐藏式走线设计,手臂的总成本约为1000-1500美元。
文档:Faze4 Robotic arm documentation

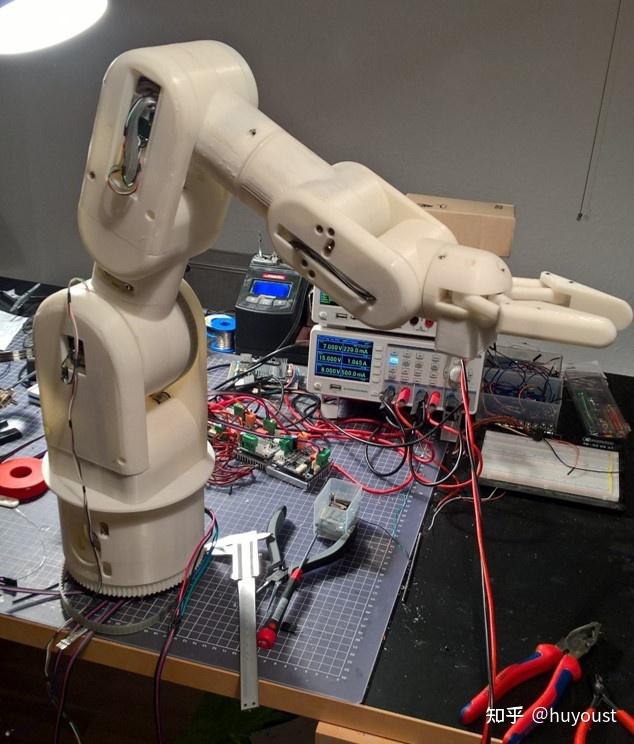
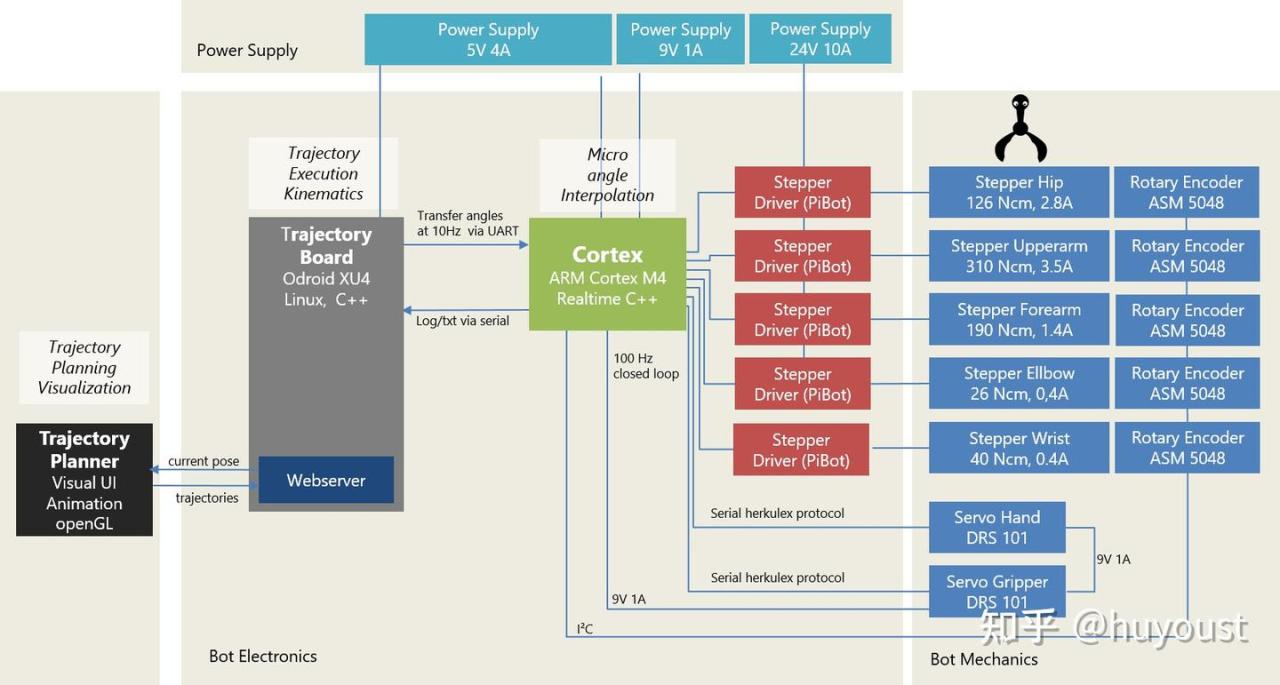
11、Walter
GitHub:https://github.com/jochenalt/Walter
文档:Walter